Многие любители собирающие устройства с шаговыми двигателями сталкиваются с такой проблемой шаговых двигателей как большое потребление тока, проявляется эта проблема в нагреве драйвера используемого для управления двигателем, часто винят в это проблеме драйвер (обычно L298) и пытаются найти ему замену. В данной статье мы выясним почему драйвер нагревается и как решить данную проблему. Если сравнивать шаговый двигатель с коллекторным (который тоже часто используется например в серводвигателях) то у коллекторных такой проблемы нет до тех пор пока нагрузка на их валу не станет больше предельно допустимой, разница между двумя этими типами двигателей заключается в том что у коллекторных двигателей переключение тока между обмотками осуществляется автоматически внутри самого двигателя а у шаговых переключение осуществляется внешним устройством т.е. драйвером который управляется контроллером. Это приводит к тому что при работе шагового двигателя возникают длительные промежутки времени когда ротор не вращается а ток идёт через обмотку. В эти промежутки времени ток через обмотку ограничивается только активным сопротивлением этой обмотки поэтому сопротивление обмоток шагового двигателя д.б. таким чтобы ток протекающий через обмотку был меньше предельно допустимого тока для используемого драйвера:
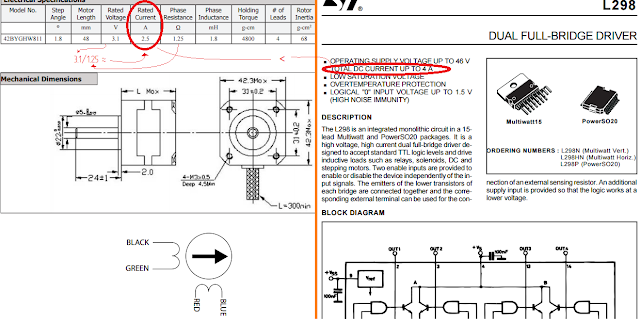 Предельный ток драйвера можно узнать из документации на него, ток обмотки шагового двигателя можно узнать из документации на этот шаговый двигатель или рассчитать по закону Ома из напряжения данного двигателя и сопротивления обмотки которое можно найти в документации или измерить омметром или мультиметром. Но драйвер и обмотки всё равно будут нагреваться поэтому на драйвер необходимо ставить большой радиатор. Также для уменьшения нагрева необходимо не делать слишком длинные импульсы напряжения на обмотках. В коллекторных двигателях проблемы с перегревом не появляются потому что прохождению тока через его обмотки препятствуют ЭДС самоиндукции обмоток и ЭДС возникающая при вращении ротора. Т.к. ротор всё время (пока подано питание) крутиться в коллекторных двигателях то и ток всё время ограничивается. Принцип работы шагового двигателя наглядно иллюстрируется на простом примере:
Предельный ток драйвера можно узнать из документации на него, ток обмотки шагового двигателя можно узнать из документации на этот шаговый двигатель или рассчитать по закону Ома из напряжения данного двигателя и сопротивления обмотки которое можно найти в документации или измерить омметром или мультиметром. Но драйвер и обмотки всё равно будут нагреваться поэтому на драйвер необходимо ставить большой радиатор. Также для уменьшения нагрева необходимо не делать слишком длинные импульсы напряжения на обмотках. В коллекторных двигателях проблемы с перегревом не появляются потому что прохождению тока через его обмотки препятствуют ЭДС самоиндукции обмоток и ЭДС возникающая при вращении ротора. Т.к. ротор всё время (пока подано питание) крутиться в коллекторных двигателях то и ток всё время ограничивается. Принцип работы шагового двигателя наглядно иллюстрируется на простом примере:

Чем больше активное сопротивление обмоток шагового двигателя тем меньше будет ток протекающий через обмотку во время когда ротор неподвижен но при этом, отчасти из за ЭДС (самоиндукции обмоток и наводимой магнитным полем вращающегося ротора)(т.к. приходится увеличивать число витков) которые препятствуют прохождению тока, максимальная скорость вращения ротора будет тем меньше чем больше это активное сопротивление.
Если драйвер подходит для данного двигателя по току то проблему перегрева драйвера можно решить изменив способ управления шаговым двигателем, например можно подавать на обмотки импульсы напряжения определённой длительности такой чтобы ротор успевал повернуться на нужный угол но не более, далее если необходимо чтобы в момент когда ротор не вращается он удерживался магнитным полем в таком положении то можно подавать на обмотку импульсы напряжения со скважностью достаточной для удержания и такой чтобы перегрев не был слишком большим. При использовании современных способов управления шаговым двигателем (например Arduino) этого можно добиться экспериментально или же можно попытаться рассчитать длительности импульсов.

КАРТА БЛОГА (содержание)

Рисунок 1 - Принцип работы шагового двигателя и ограничение тока в обмотке
Чем больше активное сопротивление обмоток шагового двигателя тем меньше будет ток протекающий через обмотку во время когда ротор неподвижен но при этом, отчасти из за ЭДС (самоиндукции обмоток и наводимой магнитным полем вращающегося ротора)(т.к. приходится увеличивать число витков) которые препятствуют прохождению тока, максимальная скорость вращения ротора будет тем меньше чем больше это активное сопротивление.

КАРТА БЛОГА (содержание)
значит ли это, что достаточно последовательно с обмотками включить сопротивление, чтобы запускать мощный шаговик от слабого драйвера (если момент и скорость не особо принципиальны)?
ОтветитьУдалить