Лазерное дистанционное управление имеет множество преимуществ описанных ранее в статье https://electe.blogspot.com/2023/03/blog-post.html. Также там имеется простая схема для реализации такого управления.

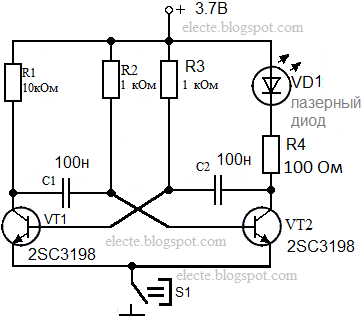
В качестве приемника используются солнечные батареи напряжения на которых измеряются компараторами. При превышении эти напряжения над опороным, компаратор страбатывает и мотор крутиться. Опорное напряжение задается солнечной батареей которая должна находиться в таких же условиях что и остальные. Т.о. система как бы сама подстраивается под изменение фонового излучения. Однако проблема заключается в том что свет всё равно не равномерно распределяется в пространстве и расположить опорную солнечную батарею так чтобы она работала как было задумано, весьма не просто. На практике, приходилось заслонять часть опорной батареи так чтобы моторы не крутились постоянно. Существует способ решить проблему и избавиться от дополнительной опорной батареи. Если свет от передатчика будет не постоянным а переменным то напряжение на солнечной батарее будет тоже переменным и с постоянной составляющей. Эту постоянную составляющую можно выделить на фильтре с конденсатором и задать как опорное напряжение т.о. оно будет изменяться в соответствии с воновым излучением. А основной сигнал будет переменным, он будет проходить через обычный резистивный делитель и попадать на неинвертирующий вход компаратора. Компаратор т.о. будет периодически срабатывать а мотор крутиться постоянно, если на солнечную батарею попадает переменный световой сигнал. Схема выглядит так:

Адрес биткоин кошелька для поддержки блога - bc1qlhrmmkh77x2lzhqe4lt9qwkglswj64tsqt2l5g