Для построения всевозможных дистанционно управляемых устройств, существует множество всевозможных готовых радиомодулей на разные частотные диапазоны. Существуют как высокочастотные WIFI модули типа ESP8266, ESP32 и т.д. на 2.4 ГГц. Так и менее высокочастотные напр. на 433 МГц. Чем выше частота радиосигнала тем хуже он проходит через разного рода препятствия вроде стен. Поэтому теоретически модули с частотой 433 МГц должны лучше передавать сигнал при той же мощности. Однако же более низкая частота также означает уменьшение максимальной скорости передачи данных и увеличение размеров эффективной антенны. На модулях ESP антенна, как правило, уже разведена на плате а к модулю на 433 МГц её, как правило, нужно припаять. Модули на 433 МГц также бывают разные. Например модули с супергетеродинным приемником rx470c-v01. Супергетеродинные приемники хороши тем что обладают хорошей избирательностью и высокой чувствительностью. Питать такие модули можно от 3.3В. Можно собрать систему управления на этих модулях например примерно по такой схеме:
При отсутствии сигнала с передатчика принимаемого приемником на выходе приемника будут шумы что следует учитывать при построении системы радиоуправления на основе этих модулей. Декодер может быть например частотный, как например такой который рассматривался в статье https://electe.blogspot.com/2025/07/blog-post.htmlа мультивибратор может быть любой способный работать на частотах декодера и с возможностью менять эти частоты например кнопками. Данную систему можно использовать для построения каких нибудь радиоуправляемых устройств. Пример можно посмотреть на видео:
the_video
Адрес биткоин кошелька для поддержки блога - bc1qlhrmmkh77x2lzhqe4lt9qwkglswj64tsqt2l5g
Недорогие WIFI модули esp8266 отлично подходят для создания на их основе дистанционных игрушек. Существуют и другие варианты но вариант с esp8266 интересен тем что в данном модуле уже имеется много функций, реализация которых, в других случаях, потребовала бы применения большего количества модулей, деталей что привело бы к увеличению стоимости и увеличению количества работы которую нужно проделать чтобы получить результат. У данных модулей имеется встроенная СВЧ антенна, надежный защищенный высокоскоростной проверенный WIFI приемопердатчик, некоторое количество пинов GPIO которого вполне может хватить на реализацию некоторого количества каналов, также имеется довольно таки относительно не слабый процессор и нормальное количество памяти для реализации и всё это на вполне компактной плате и за небольшую стоимость. Имеются конечно же и недостатки. Например могут возникнуть проблемы с управлением сервомотором, имеется кратковременное появление лог. 1 при подаче питания, управление м.б. не очень оперативным из за некоторого количества времени необходимого на установление соединения. Но в челом это весьма неплохой модуль для своей цены и если использовать его в радиоуправляемых игрушках его функций более чем достаточно. В качестве пульта управления можно использовать прибор типа смартфона, планшета, ноутбука и т.д. с WIFI если настроить модуль для роботы в режиме точки доступа. Для питания модуля можно использовать понижающий стабилизатор на 3.3В который запитывается от повышающего стабилизатора на 5В поторый запитывается от аккумулятора на 3.7В. Сорвомотор в т.с. можно запитать от 5В с повышающего модуля а драйвер двигателя напрямую от аккумулятора. Такая система показалась хорошей на практике т.к. эксперименты с батарейками и радиоуправляемым по WIFI корабликом, показали что когда батарейки садятся, может возникнуть такая неприятная вещь как остановка кораблика посреди пруда и необходимость лезть в грязную холодную воду чтобы его достать. А например повышающий модуль на 5В может напр. долго стабильно и надежно вытаскивать энергию из акумулятора даже когда он находиться под нагрузкой + некоторые готовые модули имеют встроенную светодиодную индикацию разряда батареи что может быть весьма полезным. В общем готовая схема радиоуправляемой игрушки если это напр трактор м.б. примерно такой:
В данном случае я решил сделать драйвер управления двигателем на транзисторах которые часто используются в импортных кинескопных телевизорах и по этому такие такие транзисторы можно достать практически бесплатно. Внешний вид трактора получился таким:
Большие колеса сделаны из консервных банок, маленькие это подшипники прикрученные к стойкам. Стойки сразу приделаны к сервомотору и т.о. трактор может разворачиваться очень круто, практически на месте, при крайних положениях сервомотора. Скетч для управления трактором это скетч для управления ховеркрафтом, о котором уже была речь в данном блоге, но с небольшими переделками:
О том как запрограммировать данный модуль через Arduino IDE есть отдельная статья - https://electe.blogspot.com/2023/06/esp8266-arduino-ide.html. После загрузки скетча нужно будет отключить перемычку (см. по ссылке выше) подать питание (при этом моторы на некоторое время сработают (особенность модуля ESP8266)) после можно включить WIFI на смартфоне, найти WIFI сеть модуля ESP8266 и подключиться к ней по указанному в скетче логину и паролю. После можно через браузер на смартфоне (напр. гугл хром) зайти в веб интерфейс трактора, набрав его IP адрес (192,168,4,22) в адресной строке браузера и запустив загрузку страницы. Управлять трактором можно используя ползунки в открывшемся веб интерфейсе. Каждый ползунок отвечает за свой мотор. Процесс управления можно увидеть на видео:
Адрес биткоин кошелька для поддержки блога - bc1qlhrmmkh77x2lzhqe4lt9qwkglswj64tsqt2l5g
Одной из основных причин ограничивающих скорость передвижения транспортных средств на поверхности земли, является трение. Основной идеей создания парящего на воздушной "подушке" над поверхностью, транспорта является - уменьшение трения между поверхностью и транспортным средством. Такой способ увеличения скорости можно использовать не только для больших транспортных средств перевозящих людей но и для небольших беспилотных дистранционно управляемых устройств. Используя пенопласт, мощные авиамодельные электродвигатели с винтами, легкие модули и аккумуляторы можно сделать беспилотный ховеркрафт на воздушной подушке с дистанционным управлением. Практика показывает что работать будет такая даже такая незамысловатая конструкция как плоский кусок пенопласта с дыркой посередине диаметром с пропеллер, внутрь которой данный пропеллер с двигателем помещен чтобы создавать воздушную подушку под днищем плоского куска пенопласта. В качестве модуля радиоуправления можно использовать например модуль ESP8266 т.к. он небольшой, легкий, совмещает в себе радиомодуль и микроконтроллер и в качестве пульта управления к нему можно использовать смартфон, компьютер или какое либо ещё устройство которое может быть WIFI хостом. Для управления двигателями можно использовать два logic level MOSFET транзистора с обратными диодами, а также один сервомотор который будет поворачивать тяговый двигатель с пропеллером, двигатель создающий воздушную подушку будет закреплен неподвижно.
Рисунок 1 - Схема ховеркрафта на воздушной подушке
Запитывается схема от небольшого литий-полимерного аккумулятора с напряжением 3.7В от которого питаются двигатели. Далее это напряжение повышается небольшим повышающим модулем до 5В для запитки сервомотора после напряжение подается на линейный стабилизатор до 3.3В для питания модуля ESP8266. О том как запрограммировать данный модуль через Arduino IDE есть отдельная статья - https://electe.blogspot.com/2023/06/esp8266-arduino-ide.html
Скетч можно скопировать из текстового поля:
После загрузки скетча нужно будет отключить перемычку (см. по ссылке выше) подать питание (при этом моторы на некоторое время сработают (особенность модуля ESP8266)) после можно включить WIFI на смартфоне, найти WIFI сеть модуля ESP8266 и подключиться к ней по указанному в скетче логину и паролю. После можно через браузер на смартфоне (напр. гугл хром) зайти в веб интерфейс ховеркрафта, набрав его IP адрес в адресной строке браузера и запустив загрузку страницы. Управлять ховеркрафтом можно используя ползунки в открывшемся веб интерфейсе. Каждый ползунок отвечает за свой мотор. Процесс управления ховеркрафтом можно увидеть на видео:
Адрес биткоин кошелька для поддержки канала - bc1qlhrmmkh77x2lzhqe4lt9qwkglswj64tsqt2l5g
Лазерное дистанционное управление имеет множество преимуществ описанных ранее в статье https://electe.blogspot.com/2023/03/blog-post.html. Также там имеется простая схема для реализации такого управления.
В качестве приемника используются солнечные батареи напряжения на которых измеряются компараторами. При превышении эти напряжения над опороным, компаратор страбатывает и мотор крутиться. Опорное напряжение задается солнечной батареей которая должна находиться в таких же условиях что и остальные. Т.о. система как бы сама подстраивается под изменение фонового излучения. Однако проблема заключается в том что свет всё равно не равномерно распределяется в пространстве и расположить опорную солнечную батарею так чтобы она работала как было задумано, весьма не просто. На практике, приходилось заслонять часть опорной батареи так чтобы моторы не крутились постоянно. Существует способ решить проблему и избавиться от дополнительной опорной батареи. Если свет от передатчика будет не постоянным а переменным то напряжение на солнечной батарее будет тоже переменным и с постоянной составляющей. Эту постоянную составляющую можно выделить на фильтре с конденсатором и задать как опорное напряжение т.о. оно будет изменяться в соответствии с воновым излучением. А основной сигнал будет переменным, он будет проходить через обычный резистивный делитель и попадать на неинвертирующий вход компаратора. Компаратор т.о. будет периодически срабатывать а мотор крутиться постоянно, если на солнечную батарею попадает переменный световой сигнал. Схема выглядит так:
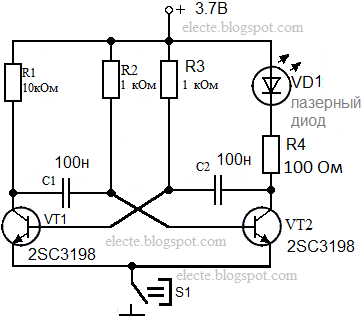
Для такого передатчика, теперь в качестве приемника, нужна не обычная лазерная указка а лазерная указка с импульсным светом. Для этого можно взять лазерный модуль и запитать его импульсным напряжением например от обычного симметричного мультивибратора на транзисторах:
Или же применить микросхему 555 или же есть огромное множество других вариантов (см. статьи, в данном блоге, по мультивибраторам). Несмотря на то что система довольно простая и то что на двигатели поступает не полная мощность, система неплохо показала себя на практике. Теперь робот стал вести себя более предсказуемо т.к. в окружающем пространстве импульсных световых помех не было, способных повлиять на работу робота. Посмотреть тест можно на видео:
Адрес биткоин кошелька для поддержки блога - bc1qlhrmmkh77x2lzhqe4lt9qwkglswj64tsqt2l5g
Популярные и недорогие WIFI модули ESP8266 можно использовать для создания, на их основе, системы дистанционного управления например самодельными кораблями. В качестве пульта управления для такого корабля можно использовать например смартфон. Дистанционно управляемый кораблик, также как и дистанционно управляемый танк, может иметь простую в реализации систему поворота путем создания ассиметричной тяги с разных сторон т.е. например если мотор с левой стороны корабля работает быстрее чем мотор с правой то корабль поворачивает на право. Если правый быстрее то налево. Моторы можно расположить по бокам и приделать к ним гребные винты или колеса. Т.к. моторы будут работать по воде а не по суше то их не обязательно дополнять редукторами для усиления и снижения оборотов. Для управления моторами можно использовать драйвер l293d или аналогичный (мотор, при этом, должен соответствовать драйверу по мощности т.е. не потреблять больше тока и напряжения чем может выдать драйвер) чтобы драйвер не сгорел. Проверить потребление тока мотором можно соединив его последовательно с амперметром и источником питания. Для драйвера L293D этот ток должен быть не боле 600мА. Для того чтобы WIFI модуль ESP8266 работал без перебоев (например при возникновении большой нагрузки на моторы) и не сгорел при превышении напряжения питания, питание на него следует подавать со стабилизатора напряжения с конденсатором для сглаживания пиков просадки и скачков напряжения. Электрическая схема кораблика, с данным модулем, будет не сложная:
Для того чтобы было удобнее управлять корабликом, применены специальные стили поворачивающие ползунки вертикально.
Один ползунок управляет одним мотором, второй ползунок управляет вторым мотором. Если ползунки не трогать то они находятся по середине и моторы не крутятся. Поднятием ползунка можно крутить мотор в одну сторону со скоростью пропорциональной уровню поднятия. Опусканием крутить в другую сторону со скоростью пропорциональной уровню отпускания. Простого способа сделать один джойстик для двух двигателей стандартными средствами HTML найти не получилось по этому пришлось использовать два ползунка. Так HTML код получается коротким, при желании можно модифицировать код и сделать более удобный орган управления. Однако ползунки всё таки поддерживаются многими браузерами а также работают на смартфонах и для их использования не надо писать много кода поэтому были выбраны они. В скетче есть закомментированные строки для случая если например понадобиться (зачем то) управлять корабликом через роутер, есть строка для задания идентификатора точки доступа без задания пароля а также строка для вывода ip адреса в последовательный порт. IP адрес задается в строке
IPAddress local_IP(192,168,4,22);
После того как скетч загружен в модуль (о том как это сделать (загрузить скетч в модуль (а также настроить среду разработки Arduino IDE)) см. первую статью о модуле ESP8266 https://electe.blogspot.com/2023/06/esp8266-arduino-ide.html) можно подать питание на модуль (3.3В (если это не специальная плата с модулем и специальным стабилизатором для него и выводом для подачи другого напряжения)) и после того как WIFI сервер, на этом модуле, запуститься (что, как правило, происходит быстро) можно будет включить поиск WIFI точек на смартфоне и найти точку с идентификатором который был задан в строке
const char* ssid = "id";
Вместо id можно задать другое название например THE_GREAT_BOT или что в этом роде. Далее чтобы подключиться к точке доступа нужно будет ввести пароль который был указан в строке:
const char *password = "987654321"; // пароль обязательно должен быть длиннее 8ми символов
пароль обязательно должен быть длиннее 8ми символов т.к. иначе программа не заработает. Пароль можно сделать посложнее чтобы потенциальным злоумышленника было сложнее угнать великолепный самодельный игрушечный радиоуправляемый по WIFI кораблик. Далее для доступа к кораблику нужно открыть браузер на смартфоне и ввести в его адресной строке IP адрес кораблика который был указан в строке:
IPAddress local_IP(192,168,4,22);
Номер порта можно не указывать если он 80. После подключения к кораблику должен появиться незамысловатый интерфейс с двумя ползунками для управления. Подробнее про работу скетча можно узнать статьи о шаблоне для ESP8266 по ссылке наверху данной страницы. Тест кораблика можно посмотреть на видео:
testtesttesttestvideohere
Тема радиоуправления является весьма интересной и востребованной однако существует множество других интересных и востребованных тем связанных с электроникой, затронутых в данном блоге. Это например: машинное зрение, бесколлекторные моторы и их контроллеры, сварочные аппараты, аппарат наплавления, 3д сканер, 3д принтер и д.р. ЧПУ станки, всевозможные роботы (напр. BEAM роботы или роботы на ардуине, распберри и т.д.), уроки по микроконтроллерам, металлоискатель, гаусган, бесплатная энергия, всевозможные варианты дистанционного управления по средствам звука, света и т.д. и многое другое. Принять участие в выборе приоритетной темы предлагается посредством криптодонатинга. Для этого нужно прислать некоторое количество сатошей по адресу:
bc1qlhrmmkh77x2lzhqe4lt9qwkglswj64tsqt2l5g
После чего прислать название темы + номер транзакции или номер отправителя например в сообщении к данной статье, в комментарии на ютуб канале или на почту: freedms@yandex.ru. Можно также, для этого, воспользоваться группой вконтакте или сообщением. Те темы которые будут набирать больше сатошей будут более приоритетными. Темы естественно д.б. по тематике блога и реально реализуемыми т.е. например космический корабль вряд ли будет реализован, в рамках данного блога, максимум что можно сделать по теме космического корабля - это словесно описать то как его можно было бы реализовать при наличии достаточного количества ресурсов и др. возможностей по его созданию. Проверка самодельного космического корабля на практике естественно не будет осуществлена, если конечно для этого не будет прислано достаточно сатошей в донате. Сатоши могут быть добыты различными способами. Например обменяны на другие валюты или товары, намайнены или добыты с биткоин кранов. Хотя последний вариант наименее прибыльный из всех, всё же он может сработать если желающих делать донаты будет мало или не будет совсем т.к. даже одна сатоша больше чем ноль сатош. При использовании биткоина важно соблюдать меры предосторожности. По возможности использовать холодные кошелки и ни в коем случае не забывать пароль от кошелька (лучше записать его на некотором количестве разных мест) т.к. надежность криптоалгоритмов биткоина очень высока.
Существует множество способов дистанционного управления различными электронными устройствами. Например это может быть управление светом, звуком, длинным проводом, радиоволнами а также есть другие способы. Использование радиоволн примечательно тем что для их создания и поглощения используются кусочки проволоки определенных форм и размеров которые можно например скрутить руками самостоятельно (чтобы тоже самое сделать для света нужны очень маленькие руки но это отдельная большая и сложная тема). Эти кусочки проволоки называются антеннами. Чтобы антенна могла излучать и принимать радиоволны, и это приносило бы пользу, нужно дополнить её дополнительными деталями т.е. сделать передатчик и приемник. Сделать данные устройства можно на специальных микросхемах или если их нет то можно даже на распространенных высокочастотных транзисторах общего назначения например на КТ315. Граничная частота коэффициента передачи тока, в схеме с общим эмиттером, для данного транзистора составляет 250 МГц. Данная частота может использоваться для радиоуправления но желательно делать некоторый запас в меньшую сторону. На рисунке ниже приведена схема двухканального приемника системы радиоуправления:
Рисунок 1 - Приемник двухканальной системы радиоуправления
Приемник имеет всего два канала, это не очень много но зато такой приемник гораздо проще изготовить без использования микросхем на одних транзисторах чем приемник с большим количеством каналов. Если нужно например 4 канала то можно сделать например два таких приемника настроенными на разные радиочастоты чтобы они друг другу не мешали. Для радиоприема в схеме имеется сверхрегенеративный каскад на транзисторе кт315. Радиочастота каскада с данными деталями не очень высокая. Для эффективного приема нужна длинная антенна. Однако практика показывает что при хорошей настройке контура, приемник может работать и с антенной длинной около 40 См. Энергия от антенны в высокочастотный контур передается через трансформатор с катушками L1 и L2. Катушка L1 располагается внутри катушки L2 и имеет больше витков, в два раза. Так, на практике, получилось добиться большей чувствительности приемника чем в случаях с одинаковым числом витков и большим на вторичной обмотке. Возможно (и скорее всего да) это не оптимальный вариант и можно экспериментальным путем добиться лучших результатов. Каскад настраивается потенциометром R2 по пьезодинамику подключенному на выход усилителя низких частот как показано на рисунке:
Рисунок 2 - Настройка РЧ каскада
Резистор R1 нужен для защиты базы транзистора VT1 на случай установки потенциометра в крайнее положение при котором он мог бы соединить базу с плюсом питания. Данным потенциометром можно установить режим при котором в пьезодинамике слышен треск и режим при котором его не слышно. Потенциометром нужно установить уровень посередине между этими режимами со слабым треском или так чтобы он возникал при касании потенциометра тогда данная схема будет нормально работать. Если треск будет постоянным и большим то импульсы будут проходить через LC фильтр для сепарации полезных НЧ сигналов и запускать мотор в отсутствии полезного сигнала с приемника. Если приемник будет в глубоком режиме без треска то он будет слабо усиливать. Настраивать радиочастоту приемника можно растяжением и сжатием витков катушки L2 или же можно её оставить как есть и настраивать, таким же образов, контур передатчика на частоту приемника. Делать это можно также по звуку с пьезодинамика. Можно также использовать осциллограф для этого. Можно даже не собирать всю схему целиком для настройки приемника а после его настройки собрать низкочастотную часть после усилителя низких частот на транзисторах VT2, VT3. В усилителе низких частот на транзисторах VT2, VT3 возможно понадобиться подобрать сопротивления резисторов R5, R7 т.к. коэффициенты усиления по току у разных транзистором могут сильно различаться. Желательно добиться на коллекторах данных транзисторов напряжений близких к половине питания для того чтобы усиливаемые сигналы меньше ограничивались. После усилителя низких частот на транзисторах VT2, VT3 находится два низкочастотных LC фильтра. Фильтр на C3 L4 нужен для пропускания полезного высокочастотного сигнала и ослабления полезного низкочастотного сигнала. Фильтр на L5 C10 нужен для пропускания полезного низкочастотного сигнала и ослабления полезного высокочастотного сигнала. LC фильтры выбраны по тому что они проще активных и цифровых фильтров и сепарируют сигналы лучше чем пассивные RC фильтры. Можно сказать что LC фильтры имеют простоту RC фильтров и хорошую сепарацию как у активных фильтров. Недостаток LC фильтров в том что они имеют большой вес и габариты из за катушек которые должны иметь большую индуктивность и большое количество витков. По этой причине данные фильтры трудно изготовить т.к. нужно сделать много витков тонким проводом. Однако практика показала что можно использовать готовые катушки которые например использовались в старых часах или можно использовать например обмотки относительно высоковольтных ( напр. 24В со стороны обмотки) реле т.е. данные обмотки имеют большое количество витков.
На выходе каждого LC фильтра стоит усилитель-детектор который выпрямляет и усиливает полезный сигнал. Далее стоит накопитель на конденсаторе. А после ещё один усилитель и эмиттерный повторитель для управления двигателем. Транзисторы в эмиттерном повторителе д.б. желательно комплементарные и достаточно мощные для управления двигателем. Поэтому Вместо кт315 и кт361 (у которого ток коллектора всего 50мА) поставлены более мощные комплементарные 2SC815 и 2SC539 (с током коллектора 200мА) которые часто встречаются в старой импортной аппаратуре. Вместо них можно также использовать любые другие подходящие по параметрам транзисторы.
Схема передатчика приведена на рисунке:
Рисунок 3 - Схема передатчика двухканальной системы радиоуправления
Передатчик будет эффективнее с двухтактным генератором чем с однотактным за счет большей мощности, для создания полезного сигнала которым будет модулироваться ВЧ сигнал, используется простой релаксационный генератор на двух транзисторах. При нажатии на кнопку S2 генератор полезного сигнала будет работать с конденсатором C5 на высокой частоте и этой частотой модулирует основной ВЧ генератор. При нажатии на кнопку S1 к конденсатору C5 параллельно подключается конденсатор C4 с большой ёмкостью и генератор полезного сигнала работает на низкой частоте. Т.о. при нажатии на одну кнопку мотор будет крутиться в одну сторону, при нажатии на другую кнопку мотор будет крутиться в другую сторону. Если нажать сразу на две кнопки то генератор полезного сигнала будет работать на низкой частоте и мотор будет крутиться в соответствующую, этой частоте, сторону. Антенна передатчика д.б. таких же размеров как и антенна приемника. Катушки L1 и L2 являются одной катушкой с отводом от середины. Передатчик настраивается на частоту приемника путем растяжения и сжатия витков данной катушки.
Запитать передатчик можно например от 4х никель метал гидридных аккумуляторов. Напряжение от них будет близко к 5В. Слишком высоким напряжением запитывать передатчик не надо т.к. ВЧ генератор легко может сгореть. Приемник можно запитать от двух литий полимерных аккумуляторов с общим напряжением около 7.4В. Для нормальной работы сверхрегенеративного каскада приемника желательно стабильное напряжение питания и аккумулятор можно дополнить стабилизатором но если аккумулятор достаточно мощный а мотор нет то возможно что аккумулятор будет хорошо держать напряжение и стабилизатор не понадобиться. По крайней мере с таким аккумулятором собранный радиоуправляемый автомобиль работал. Тест собранного радиоуправляемого автомобиля можно увидеть на видео:
vvvvvvvvvv
Можно заметить что иногда радиоуправляемый автомобиль дергается при движении в одну сторону. Возможно что это вызвано тем что антенна, при движении, качается а так как радиосигнал поляризованный то сигнал принимается слабее при наклоне антенны. Для лучшего приема с такими антеннами желательно чтобы они обе располагались вертикально относительно поверхности земли. Также было замечено что пъезодинамик приемника начинает звучать на гораздо большем расстоянии от передатчика чем мотор начинает крутиться. Мотор крутиться когда пульт находиться близко к приемнику. Это свидетельствует о том что ВЧ каскад и каскады усиления звуковой частоты работают хорошо но сигналы после частотной сепарации усиливаются недостаточно хорошо. Схему можно пробовать дорабатывать, возможно получиться увеличить усиление путем подбора номиналов или внесения изменений в схему, например добавлением транзисторов. Однако даже без этого получилась неплохая игрушка на транзисторах.
Тема радиоуправления является весьма интересной и востребованной однако существует множество других интересных и востребованных тем связанных с электроникой, затронутых в данном блоге. Это например: машинное зрение, бесколлекторные моторы и их контроллеры, сварочные аппараты, аппарат наплавления, 3д сканер, 3д принтер и д.р. ЧПУ станки, всевозможные роботы (напр. BEAM роботы или роботы на ардуине, распберри и т.д.), уроки по микроконтроллерам, металлоискатель, гаусган, бесплатная энергия, всевозможные варианты дистанционного управления по средствам звука, света и т.д. и многое другое. Принять участие в выборе приоритетной темы предлагается посредством криптодонатинга. Для этого нужно прислать некоторое количество сатошей по адресу:
bc1qlhrmmkh77x2lzhqe4lt9qwkglswj64tsqt2l5g
После чего прислать название темы + номер транзакции или номер отправителя например в сообщении к данной статье, в комментарии на ютуб канале или на почту: freedms@yandex.ru. Можно также, для этого, воспользоваться группой вконтакте или сообщением. Те темы которые будут набирать больше сатошей будут более приоритетными. Темы естественно д.б. по тематике блога и реально реализуемыми т.е. например космический корабль вряд ли будет реализован, в рамках данного блога, максимум что можно сделать по теме космического корабля - это словесно описать то как его можно было бы реализовать при наличии достаточного количества ресурсов и др. возможностей по его созданию. Проверка самодельного космического корабля на практике естественно не будет осуществлена, если конечно для этого не будет прислано достаточно сатошей в донате. Сатоши могут быть добыты различными способами. Например обменяны на другие валюты или товары, намайнены или добыты с биткоин кранов. Хотя последний вариант наименее прибыльный из всех, всё же он может сработать если желающих делать донаты будет мало или не будет совсем т.к. даже одна сатоша больше чем ноль сатош. При использовании биткоина важно соблюдать меры предосторожности. По возможности использовать холодные кошелки и ни в коем случае не забывать пароль от кошелька (лучше записать его на некотором количестве разных мест) т.к. надежность криптоалгоритмов биткоина очень высока.
Дистанционное лазерное управление не часто используется т.к. для лазерного луча существует много препятствий в окружающем мире которые проще обходятся радиоволнами из за чего именно радиоуправление получило наиболее широкое распространение. Лазерному лучу может быть препятствием любой непрозрачный или частично прозрачный элемент окружающей среды например туман или гипсокартоновая стена. Однако же при ясной погоде и отсутствии стен, лазерное управление имеет множество преимуществ перед радиоуправлением. Например большая эффективность по соотношению мощность/дальность действия т.к. лазерный световой луч направлен и может быть сфокусирован на небольшую площадь, чего обычно очень трудно добиться для радиоволн т.к. длинна волны их велика по сравнению со световой а при использовании высокочастотных излучателей возникают такие же проблемы как и со светом по тому что чем выше частота излучения тем сильнее оно поглощается элементами окружающей среды. Направленность лазерного луча создает проблемы для перехвата передаваемой им инфрмации т.к. приемник должен находиться не где то в пространстве в радиусе действия излучения а на линии по которой идет луч. Лазерным лучем можно передавать больше информации за меньшее время чем это можно сделать для радиоволн т.к. скорость передачи информации ограничена частотой излучения. Помех для фотоприемников лазерного излучения существует меньше чем для радиоприемников из за большей популярности радиоволн для передачи радиоволн. Одним из самых важных достоинств лазерного управления является простота реализации электроники. Излучателем может быть обычный светодиодный лазер из лазерной указки а приемником например фотодиод или солнечная батарея. Солнечные батарей могут использоваться как датчики т.к. они обладают хорошей чувствительностью к свету и большой площадью. Большая площадь поверхности солнечной батареи упрощает нацеливание лазерного луча на эту батарею и уменьшает вероятность промахнуться. Используя солнечные батареи и лазерную указку можно сделать простое лазерное управление роботом с поворотами по танковой схеме. Чтобы сделать схему, первое что приходит на ум, для этого можно использовать два компаратора (например LM339 -> https://alii.pub/6mvv1t) сравнивающих напряжения с солнечных батарей с каким то опорным напряжением и управляющих транзисторами управляющими моторами:
Рисунок 1 - Датчики света с солнечными батареями
Схема простая однако имеет один серьезный недостаток который делает её не пригодной для применения на практике (за исключением случаев применения её в полной темноте). Трудность заключается в правильном выборе опорного напряжения компараторов а именно в том что оно, ввиду действия факторов окружающей среды, не может быть постоянным следовательно не может быть задано обычным делителем на резисторах т.к. небольшое изменение фонового излучения, при этом, приведет либо к тому что оба мотора будут работать либо они не заработают при попадании лазерного луча на солнечные панели т.к. напряжения выдаваемого ими не хватит для того чтобы быть большим чем опорное. Самый простой способ решить проблему - это добавить ещё одну такую же солнечную батарею которая будет находиться в таких же условиях как и две другие и использовать её для задания опорного напряжения. Напряжения с основных солнечных батарей, при этом, надо немного уменьшить делителями так чтобы при попадании на них лазерного луча напряжение на них превышало опорное. Схема, при этом, будет выглядеть примерно так:
Рисунок 2 - Схема робота с лазерным дистанционным управлением
Схема, по прежнему, очень простая и устойчивая к изменению фонового светового излучения при использовании одинаковых солнечных батарей, прецезионных резисторов и аналогично сбалансированных остальных частях схемы. Реальные элементы электрических цепей не так хороши как в теории поэтому робот всё равно может начать вести себя непредсказуемо или отказаться работать. Есть некоторое колличество способов решить эту проблему. Можно например заменить делитель на R3 и R4 потенциометром на подстроечном резисторе и также поступить с делителем на резисторах R5 и R6. Можно управлять роботом в темноте и увеличить немного сопротивления резисторов R5 и R3. Можно регулировать количество падающего на солнечные батареи света как было сделано для робота на видео:
В 90е годы была популярна радиоуправляемая игрушка модель автомобиля ВАЗ 2109 (или "девятка"). Дети обычно не очень бережно относятся к вещам поэтому часто такие игрушки часто ломаются но если целыми остались хотя бы корпус и колеса то такую игрушку можно реинкарнировать оснастив современной электроникой и моторами. Можно добавить задний ход которого не было в оригинале. В качестве электроники для данного автомобиля можно применить например уже проверенные схемы на ардуине. Схема универсального пульта:
Рисунок 1 - Схема пульта на Ардуине
Схема приемника автомобиля ВАЗ 2109:
Рисунок 2 - Схема приемника
Вместо батареек можно использовать например современные литий ионные аккумуляторы.
Скетч передатчика:
Скетч приемника:
Видео с тест драйвом данного автомобиля:
Поискать модели автомобиля можно например по этой ссылке КАРТА БЛОГА (содержание)
Современные микросхемы и электронные модули значительно упрощают процесс изготовления разнообразных электронных устройств на их основе. Особенно это актуально для устройств работающих с радиоволнами т.к. для высокочастотных устройств имеются определнные требования к качеству разводки и изготовления плат и некоторым другим вещам которые бывает трудно реализовать в неподходящих, для этого, условиях. Однако же электронные системы, работающие с радиоволнами, существовали до появления микросхем а следовательно могут быть реализованы на дискретных элементах. Делать это может быть необходимо по разным причинам. Давайте представим например что сделать такое устройство необходимо например в гипотетической стране которая по каким то причинам не ведет торговлю с другими странами а производить может только дискретные элементы. Удивительная ситуация но допустим например чисто теоретически что она возникла. В одной из предыдущих статей рассматривалась многоканальная система радиоуправления с микросхемой-счетчиком для распределения одного канала импульсов на их большее количество. Одним из возможных вариантов построения многоканальной системы радиоуправления будет - замена двоичного интегрального счетчика на двоичный транзисторный счетчик. Двоичный счетчик может быть построен на Т-триггерах. Т-триггер - это такой триггер который меняет свое состояние на выходе при подаче сигнала на его вход т.о. получается что один такой триггер является одноразрядным двоичным счетчиком. Если соединить выход одного Т триггера со входом другого то получиться двухразрядный двоичный счетчик который можно применить для увеличения количества каналов системы радиоуправления. Однако построение такого счетчика на дискретных элементах - не простая задача т.к. для его реализации требуется большое количество деталей. Если пытаться его уменьшать всевозможными ухищрениями то можно ухудшить его качество. Под "качеством", в данном случае, можно подразумевать такие характеристики как стабильность, скорость работы (что важно для двухканальной системы "реального времени") и возможно некоторые другие. За основу для построения Т триггера, на дискретных элементах, можно взять обычный RS триггер на транзисторах:
Рисунок 1 - RS триггер на транзисторах
Для построения Т триггера на основе данного RS триггера, его нужно дополнить элементами задержки:
Рисунок 2 - RS триггер на транзисторах с элементами задержки
Это нужно для того чтобы триггер мог поменять свое состояние относительно того которое, как бы временно сохранено в таком импровизированном ОЗУ. Иначе триггер бы переключившись, сразу же бы увидел новое состояние и начал бы снова переключаться и т.д. т.е. без элементов задержки сделать Т триггер нельзя. Далее понадобятся два логических элемента "И-НЕ" чтобы просадить на землю одну из половин триггера в зависимости от того какая из них просажена в данный момент и чтобы это происходило только в том случае если на вход подан короткий запускающий импульс. Запускающий импульс должен быть коротким для того чтобы напряжения на конденсаторах элементов задержки не успели сильно измениться и повлиять на правильную работу триггера. Данное поведение не сильно соответствует обычному Т триггеру который может работать с обычными сигналами но это плата за простоту схемы, иначе пришлось бы использовать большое количество транзисторов. Схема с добавленными элементами "И-НЕ" :
Рисунок 3 - RS триггер на транзисторах с элементами задержки и "И-НЕ"
Для укорачивания запускающего импульса можно использовать конденсатор а для того чтобы он мог разрядиться можно поставить паралельно ему резистор с большим сопротивлением чтобы он не сильно влиял на вход триггера. К сожалению запустить такой триггер получается только применением ключа с низким сопротивлением в открытом состоянии поэтому из наиболее распространеных дискретных элементов запустить его получается только у реле. А так как коллекторы половин RS триггера очень чувствительные то для передачи сигнала от них получилось применить только оптроны. Возможно подбором элементов можно добиться других решений но в ходе не сильно времязатратных опытов, рабочим вариантом двухразрядного двоичного счетчика на дискретных элементах оказалась такая схема:
Рисунок 4 - Двухразрядный двоичный счетчик на дискретных элементах
Рисунок 5 - Схема двухканального радиоприемника на дискретных элементах
В одну из половин одного из триггеров добавлен неиспользуемый оптрон для равновесия триггера и увеличения стабильности работы схемы. Схема получилась громоздкой, медленной и ненадежной но тем не менее это двухканальный радиоприемник на дискретных элементах который можно пытаться совершенствовать. Увидеть его в действии (по светодиодам) можно на видео:
Дистанционно управляемое транспортное средство с камерой передающей изображение на экран может иметь много применений а также это весьма интересная штука. Такую штуку можно сделать на основе модуля ESP32-CAM (http://alii.pub/69872w) для чего его нужно дополнить самим транспортным средством и драйверами для его управления через данный модуль. В простейшем случае транспортным средством может быть какая либо колесная платформа поворачивающаяся по танковой схеме. Если исключить возможность заднего хода то электрическая схема всей конструкции может быть очень простой:
Рисунок 1 - Схема радиоуправляемого автомобиля с камерой
В схеме имеется гальваническая развязка силовой и логической части для защиты модуля ESP32-CAM. Используются оптроны 4N33 с током коллектора до 100мА. Это не очень большой ток поэтому моторы должны быть соответственно не очень мощными или оптроны должны быть мощнее в случае использования мощных двигателей. Модуль следует подготовить, об этом есть статья https://electe.blogspot.com/2022/03/esp32-cam.html. После того как пароль от wifi вписан нужно найти то ветвление (во вкладке app_httpd.cpp) в котором прописывалось включение светодиода но только теперь добавить строки для управления пинами 12 и 13 например так:
else if(!strcmp(variable, "left"))
{
pinMode(12,OUTPUT);
digitalWrite(12,HIGH);
pinMode(13,OUTPUT);
digitalWrite(13,LOW);
}
else if(!strcmp(variable, "right"))
{
pinMode(12,OUTPUT);
digitalWrite(12,LOW);
pinMode(13,OUTPUT);
digitalWrite(13,HIGH);
}
else if(!strcmp(variable, "forward"))
{
pinMode(12,OUTPUT);
digitalWrite(12,HIGH);
pinMode(13,OUTPUT);
digitalWrite(13,HIGH);
}
else if(!strcmp(variable, "stop"))
{
pinMode(12,OUTPUT);
digitalWrite(12,LOW);
pinMode(13,OUTPUT);
digitalWrite(13,LOW);
pinMode(12,INPUT);
pinMode(13,INPUT);
}
Теперь чтобы модуль заработал осталось поменять соответствующим образом фронтенд который накодится по вкладке camera_index.h. В коде на этой вкладке есть 2 массива для разных камер. Нужно выбрать массив с камерой которая используется и заменить его содержимое. Для этого можно например скопировать его содержимое в программу для разархивации из формата .gz в .html потом изменить html код, после чего сжать его программой архиватором в формат .gz и содержимое переместить в выбранный массив. html код который будет работать с кодом выше может выглядеть например так:
Это довольно минималистичный веб интерфейс без излишеств, только с изображением для вывода потокового видео и кнопками для управления автомобилем. Основная функция в данном коде -fetch() для отправки get запроса с командами управления моторами. А также тег img для отображения видео. В сжатом виде данный код будет выглядеть так:
Удивительно, но после сжатия размер занимаемой памяти увеличился. Возможно сжатие начнет работать нормально при больших html кодах поэтому тут можно не экономить и сделать большую и красивую веб страницу. Но конечно же в разумных пределах т.е. не стоит например подключать react или другой большой фреймворк. Модуль может этого не потянуть даже со сжатием. В результате после внесения данных поправок в стандартный скетч и загрузки его в автомобиль, получается интересная радиоуправляемая по wifi со смартфона или компьютера машинка, тест драйв которой можно посмотреть на видео:
Зима это хорошее время для того чтобы испытать самодельный радиоуправляемый транспорт с воздушной тягой т.к. именно в этот период времени поверхность земли покрывается белым скользким слоем по которому может прекрасно скользить небольшой моторный аппарат с пропеллерами. При этом можно не волноваться о том что самодельный аппарат глубоко утонет т.к. этому будет препятствовать обычный твердый слой земли обычного цвета который находиться под белым слоем. Механическую часть аэроснегохода можно сделать по той же схеме что и у аэромобиля (см. https://electe.blogspot.com/2017/05/blog-post_21.html) только вместо колес поставить лыжи из например пластиковых бутылок или (как в случае на видео ниже) из пенала для ручек имеющего отличную аэродинамическую форму. Схемы и скетчи также можно использовать такие же как у аэромобиля или как у самолета https://electe.blogspot.com/2020/06/arduino-nano.html. Схема пульта:
Рисунок 1 - Пульт
Это универсальный пульт для самодельных радиомоделей на ардуине. Скетч внутри него можно не менять. Схема приемника:
Рисунок 2 - Приемик
Заднего хода нет т.к. для управления одним мотором используется один транзистор. Для управления вторым мотором используется второй транзистор. Конденсаторы нужны для ослабления помех возникающих во время работы мотора. Чтобы был задний ход нужно использовать H мосты. Т.к. мост, на ту же мощность что и транзистор на схеме, имеет большие габариты а также утяжеляет и усложняет всю конструкцию то от них (и соответственно от заднего хода) пришлось отказаться. Скетчи можно скопировать на страницах по ссылкам выше (для самолета или аэромобиля). Увидеть аэроснегоход в действии можно на видео:КАРТА БЛОГА (содержание)
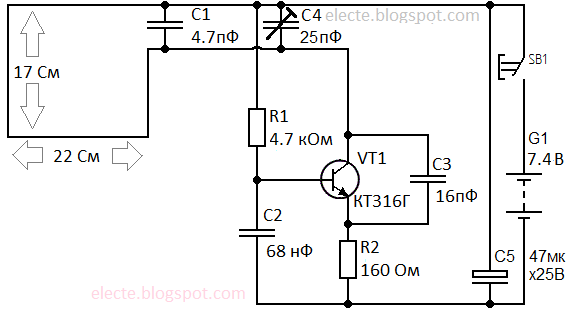
Большой ассортимент электронных модулей, в продаже, дает возможность изготовлять сложные электронные устройства без необходимости понимать принципиальные электрические схемы и принципы их работы. Однако же умение конструировать электронные устройства на обычных радиодеталях дает возможность создавать разнообразные не шаблонные решения которые не могут быть эффективно реализованы с обычными модулями. Например используя обычные радиодетали можно сделать более дешевую систему радиоуправления и с большим числом каналов чем это возможно при покупке готовой. В одной из предыдущих статей -> http://electe.blogspot.com/2020/04/blog-post.html уже рассматривалась простейшая система радиоуправления с приемником без радиочастотного LC контура. Такой приемник улавливал и усиливал все радиосигналы и помехи которые были вокруг, поэтому использовать его можно только в свободном от сильных помех месте или со сниженной чувствительностью и на небольшом расстоянии от передатчика. Передатчик, при этом, должен быть достаточно мощным чтобы перекрывать помехи. При этом такой передатчик сам становиться неплохим источником помех. По вышеупомянутым причинам, приемники подобного типа имеют малое практическое применение. В основном их используют для проверки и настройки передатчиков, также их можно использовать например если нужно зафиксировать любой радиосигнал. Чтобы приемнику не мешали не предназначенные для него радиосигналы в нем должен быть радиочастотный LC контур резонансная частота которого должна быть равна частоте LC контура передатчика для данного приемника. При этом приемник может быть более чувствительным и работать с более слабым передатчиком на большем расстоянии чем в случае с приемником без радиочастотного LC контура. Передатчиком может быть, например, генератор Колпитца (ёмкостная трехточка) с индуктивной антенной которая является катушкой радиочастотного LC контура передатчика:
Рисунок 1 - Передатчик с индуктивной рамочной антенной
Конденсатор C1 можно не ставить, в схеме он для достоверности испытаний которые можно увидеть на видео внизу страницы. Размеры антенны также можно менять но при этом необходимо учитывать то что она должна обладать некоторой индуктивностью достаточной для работы генератора. Поэтому её не надо делать слишком маленькой. Хотя чем более высокочастотный транзистор используется тем меньше антенна может быть. Конденсатором C4 можно настраивать LC контур на нужную частоту. Схем приемников с радиочастотными LC контурами существует много но наиболее дешевые и часто используемые для радиоуправления - это схемы со сверхрегенеративным каскадом т.к. радиочастотный усилитель, в таких схемах, может быть построен всего на одном транзисторе. Принцип работы сверхрегенератора довольно сложен но основная идея заключается в том что положительная обратная связь, усилителя радиочастоты, периодически меняется и пересекает точку оптимального усиления. Остальная часть схемы, для усиления низкой частоты и распределения сигнала на каналы, тривиальна и при её построении можно даже проявить фантазию. Например схема может быть такой:
Рисунок 2 - Приемник со сверхрегенеративным каскадом
Сверхрегенеративный каскад, с виду, напоминает генератор Колпитца используемый в передатчике т.к. усилитель в сверхрегенераторе имеет положительную обратную связь реализованную аналогично этому генератору. Однако в сверхрегенераторе эта связь периодически изменяется. Для того чтобы это происходило в схеме имеются детали L2, R3
и C5. Настройку сверхрегенеративного каскада можно производить конденсатором C4 (конденсатор C1 также можно не ставить) и резистором R2. Следить за реакцией приемника можно осциллографом. Если осциллографа нет то можно делать это пьезодинамиком на слух (см. видео внизу данной страницы), хотя это менее удобный и эффективный способ. На выходе сверхрегенеративного каскада стоит фильтр после которого имеется усилитель низких частот на VT2 которым может быть BC547 или аналогичный транзистор. Далее есть операционный на микросхеме LM358 (или аналогичной (главное чтобы был пушпульный выход а не открытый коллектор или что то подобное)) усилитель работающий в режиме компаратора после которого стоит емкостной делитель и одновибратор на втором операционном усилителе микросхемы LM358 (о таком одновибраторе есть отдельная статья -> http://electe.blogspot.com/2014/06/blog-post.html) Одновибратор нужен чтобы частые скачки напряжения объединять в один импульс. На выход одновибратора можно поставить например двоичный счетчик для распределения сигнала по некоторому количеству каналов. Это не самый удобный но, тем не менее, простой, рабочий и надежный способ распределения сигнала на несколько каналов. Так можно соединить несколько двоичных счетчиков с большим количеством выходов и получить очень много каналов но управлять чем либо, таким образом, будет очень не удобно т.к. нажимать кнопку для включения последних каналов придется много раз. Систему можно усовершенствовать но даже в таком виде для неё можно найти практическое применение. Видео о системе радиоуправления: